Jak určit rychlost otáčení elektromotoru » Info pro elektrikáře
Rychlosti otáčení asynchronního elektromotoru se obvykle rozumí úhlová frekvence otáčení jeho rotoru, která je na typovém štítku (na typovém štítku motoru) uvedena jako počet otáček za minutu. Třífázový motor lze napájet i z jednofázové sítě, stačí k jednomu nebo dvěma jeho vinutí přidat paralelně kondenzátor, v závislosti na síťovém napětí, ale design to nezmění; motoru.

Pokud tedy rotor pod zatížením udělá 2760 otáček za minutu, pak se úhlová frekvence tohoto motoru bude rovnat 2760 * 2pi/60 radiánů za sekundu, tedy 289 rad/s, což není vhodné pro vnímání, takže nápis jednoduše říká „2760 ot./min“ min. Ve vztahu k asynchronnímu elektromotoru je to rychlost zohledňující skluz s.
Synchronní rychlost tohoto motoru (bez zohlednění skluzu) se bude rovnat 3000 otáčkám za minutu, protože když jsou vinutí statoru napájena síťovým proudem o frekvenci 50 Hz, magnetický tok každou sekundu provede 50 úplných cyklů změny a 50 * 60 = 3000, takže To se ukáže jako 3000 ot / min – synchronní rychlost asynchronního elektromotoru.
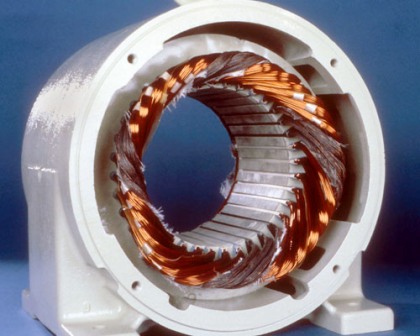
V tomto článku budeme hovořit o tom, jak určit rychlost synchronního otáčení neznámého třífázového asynchronního motoru jednoduše pohledem na jeho stator. Podle vzhledu statoru, podle umístění vinutí, podle počtu štěrbin snadno určíte synchronní otáčky elektromotoru, pokud nemáte po ruce otáčkoměr. Začněme tedy popořadě a podívejme se na tuto problematiku na příkladech.
Počet otáček 3000
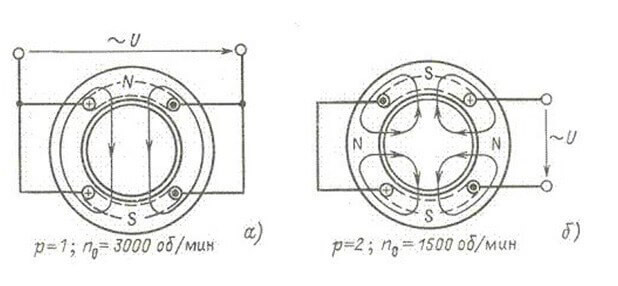
O asynchronních elektromotorech (viz – Typy elektromotorů) je zvykem říkat, že konkrétní motor má jeden, dva, tři nebo čtyři páry pólů. Minimum je jeden pár pólů, to znamená, že minimum jsou dva póly. Podívejte se na obrázek. Zde vidíte, že stator obsahuje dvě sériově zapojené cívky pro každou fázi – v každé dvojici cívek je jedna umístěna naproti druhé. Tyto cívky tvoří dvojici pólů na statoru.
Jedna z fází je pro přehlednost zobrazena červeně, druhá zeleně a třetí černě. Vinutí všech tří fází jsou uspořádána stejným způsobem. Protože jsou tato tři vinutí napájena střídavě (třífázový proud), pak se při 1 kmitu z 50 v každé z fází magnetický tok statoru otočí jednou o celých 360 stupňů, to znamená, že udělá jednu otáčku. za 1/50 sekundy, což znamená 50 otáček za sekundu. Takže to vychází na 3000 ot./min.
Je tedy zřejmé, že k určení synchronních otáček asynchronního elektromotoru stačí určit počet párů jeho pólů, což lze snadno provést odstraněním krytu a pohledem na stator.
Vydělte celkový počet statorových štěrbin počtem štěrbin na sekci vinutí jedné z fází. Pokud dostanete 2, pak máte motor se dvěma póly – s jedním párem pólů. Proto je synchronní frekvence 3000 ot/min nebo přibližně 2910 včetně skluzu. V nejjednodušším případě je 12 slotů, 6 slotů na cívku a 6 takových cívek – dvě pro každou ze tří fází.
Upozorňujeme, že počet cívek v jedné skupině pro jeden pár pólů nemusí být nutně 1, ale také 2 a 3, nicméně například jsme zvažovali variantu s jednotlivými skupinami pro pár cívek (nebudeme se věnovat metody navíjení v tomto článku).
Počet otáček 1500

Pro získání synchronní rychlosti 1500 ot./min se počet pólů statoru zdvojnásobí, takže při 1 kmitu z 50 by magnetický tok udělal jen půl otáčky – 180 stupňů.
K tomu jsou pro každou fázi vyrobeny 4 sekce vinutí. Pokud tedy jedna cívka zabírá čtvrtinu všech slotů, máte motor se dvěma páry pólů tvořenými čtyřmi cívkami na fázi.
Například 6 slotů z 24 je obsazeno jednou cívkou nebo 12 ze 48, což znamená, že máte motor se synchronní rychlostí 1500 ot./min, nebo s přihlédnutím k klouzání přibližně 1350 ot./min. Na zobrazené fotografii je každá sekce vinutí vyrobena ve formě skupiny dvojitých cívek.
Počet otáček 1000
Jak jste již pochopili, pro získání synchronní frekvence 1000 otáček za minutu tvoří každá fáze již tři páry pólů, takže při jedné oscilaci 50 (hertzů) by se magnetický tok otočil pouze o 120 stupňů a podle toho by otočil rotor. .
Na stator je tedy instalováno minimálně 18 cívek, přičemž každá cívka zabírá šestinu všech slotů (šest cívek na fázi – tři páry). Pokud je například 24 slotů, pak jedna cívka zabere 4 z nich. Výsledná frekvence s přihlédnutím k skluzu je cca 935 ot./min.
Počet otáček 750
Pro získání synchronní rychlosti 750 ot/min je nutné, aby tři fáze tvořily čtyři páry pohyblivých pólů na statoru, to je 8 cívek na fázi – jedna proti druhé – 8 pólů. Pokud je například pro 48 slotů cívka na každých 6 slotů, máte asynchronní motor se synchronními otáčkami 750 (nebo asi 730 s přihlédnutím k posuvu).
Počet otáček 500
Konečně pro získání asynchronního motoru se synchronní rychlostí 500 ot./min je potřeba 6 párů pólů – 12 cívek (pólů) na fázi, takže při každém kmitu sítě se magnetický tok otočí o 60 stupňů. Tedy pokud má např. stator 36 slotů, kdežto na cívku jsou 4 sloty – máte třífázový motor s 500 otáčkami za minutu (480 včetně skluzu).
- Proč motorové kartáče jiskří?
- Typy a konstrukce regulátorů otáček pro komutátorové motory
- Svodový proud v elektrických sítích, jak zkontrolovat a najít svodový proud
Doufám, že vám tento článek pomohl. Podívejte se také na další články z kategorie Tajemství elektrikářů, Elektromotory a jejich aplikace
Přihlaste se k odběru našeho kanálu na Telegram: World of Electricity
Zde můžete zanechat komentář, položit otázku a jen chatovat:
Chat na elektrická témata
Sdílejte tento článek se svými přáteli:
Asynchronní elektromotory jsou nejběžnějšími elektrickými stroji používanými v pohonech průmyslových a domácích zařízení. Jejich hlavní výhody: relativně nízká hmotnost při vysokém výkonu, jednoduchý design, nízká cena.
Zvažme způsoby regulace rychlosti rotoru asynchronních motorů. Otáčky hřídele lze teoreticky nastavit několika způsoby:
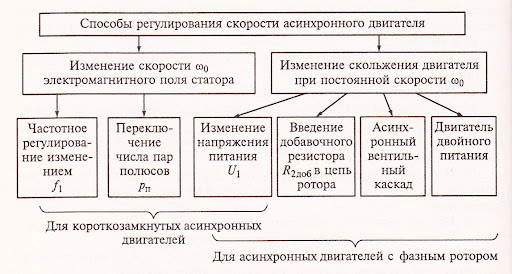
V praxi se nejčastěji používají 2 metody:
- Změna počtu pólů statoru.
- Regulace napětí na vinutí statoru nebo rotoru.
- Změna frekvence napájecího napětí.
Mechanické převodovky se používají také k regulaci otáček asynchronních elektrických strojů. Zvažme konstrukci asynchronního elektromotoru a výhody a nevýhody každého způsobu změny rychlosti otáčení.
Zařízení asynchronního motoru
Existují 2 hlavní typy asynchronních elektrických strojů s fázovými rotory a rotory nakrátko. Konstrukce druhého je znázorněna na obrázku:
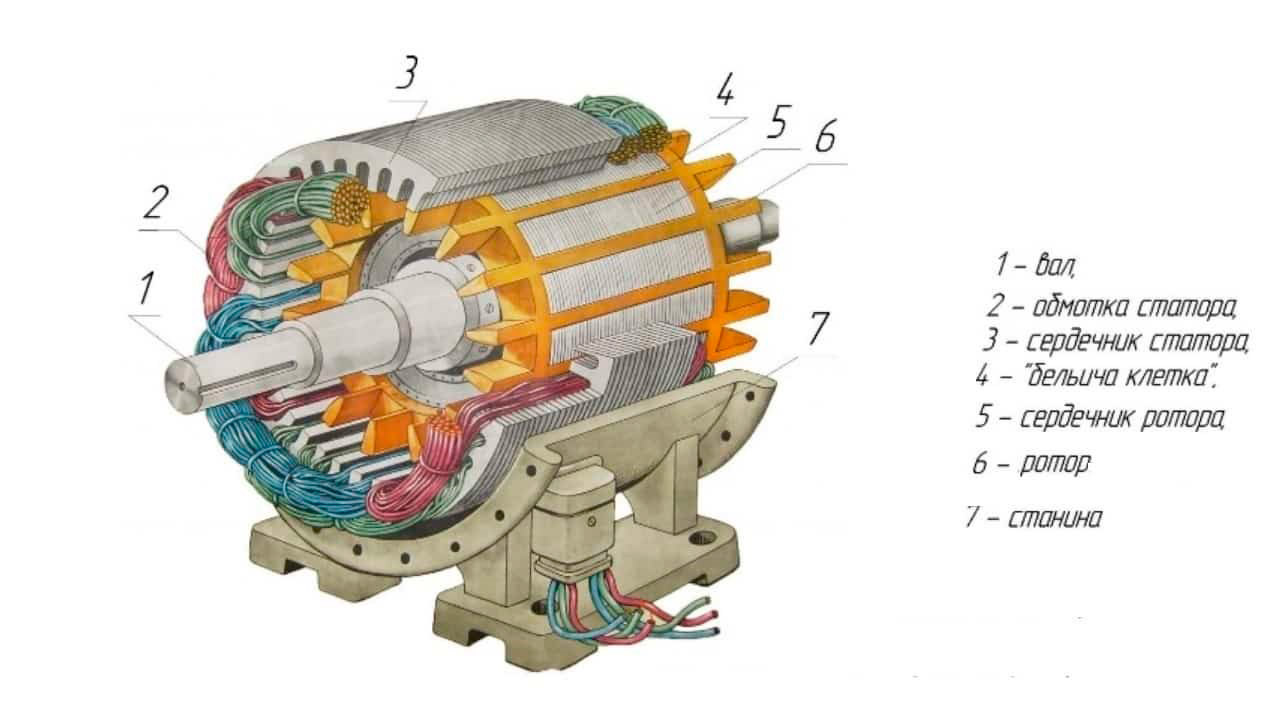
Motor se skládá z rotujícího rotoru, stacionárního statoru, skříně a rámu. Stator obsahuje třífázové vinutí s úhlovou vzdáleností 120°, zapojené do hvězdy nebo trojúhelníku.
Konstrukce rotoru je tzv. klec na veverku a skládá se z tyčí zahnutých mezi 2 kroužky.
Při přivedení napětí na vinutí statoru se objeví magnetické pole, které indukuje proud v rotující části, při interakci polí se rotor začne otáčet ve stejném směru jako magnetické pole statoru. Frekvence otáčení pohyblivé části poněkud zaostává za rychlostí otáčení pole; tento rozdíl se nazývá skluz.
Elektrické stroje s vinutým rotorem se liší provedením rotační části. Obsahuje třífázové vinutí, zapojené do hvězdy a připojené k regulačnímu reostatu. Proud v něm lze tedy upravit změnou rychlosti otáčení a točivého momentu.

Konstrukce motorů s vinutým rotorem je složitější, mezi výhody takových elektrických strojů patří zlepšené startovací vlastnosti.
Způsoby regulace rychlosti otáčení změnou počtu pólových párů a napětí na vinutích
Frekvence otáčení hřídele asynchronních motorů je určena ze vzorce: n = 60f / p, kde f je frekvence síťového napětí Hz, p je počet pólových párů statoru. Přivedením napětí na různé části vinutí lze tedy změnit počet připojených pólových párů a upravit rychlost motoru. Nevýhody této metody zahrnují složitost návrhu. Rychlost lze navíc upravovat pouze v krocích o číslo, které je násobkem počtu párů pólů.
Další metodou změny otáček motoru je úprava napájecího napětí. Je nevhodný pro asynchronní motory s rotorem nakrátko, protože snížením napětí na vinutí statoru výrazně snižuje tuhost mechanických charakteristik.
Oblastí použití této metody jsou pohony s asynchronními motory s vinutým rotorem. Pro regulaci napětí je do obvodu ráfku rotační části zaveden reostat. Tak je možné plynule měnit rychlost otáčení hřídele až do synchronní rychlosti 3000 ot./min.
Mezi nevýhody patří značná ztráta napětí na odporovém prvku a nedostatečná účinnost při nízké zátěži.
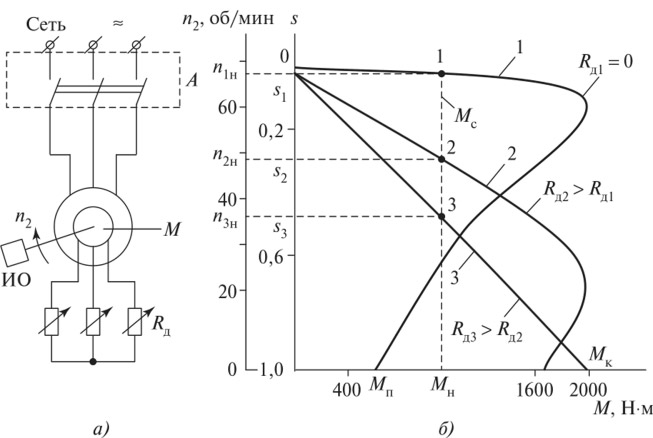
Zhoršují se také mechanické vlastnosti.
Frekvenční řízení otáček asynchronních motorů
Rychlost otáčení asynchronních motorů lze také řídit změnou frekvence napájecího napětí. S příchodem rychle spínaných tranzistorů a tyristorů bylo možné použít elektronické invertory pro změnu frekvence napětí dodávaného do statoru.
Tato metoda nemá všechny nevýhody regulace napětí a má následující výhody:
- Udržuje pevný výkon při jakékoli rychlosti bez ohledu na zatížení.
- Hladká, plynulá změna rychlosti otáčení.
- Nastavitelné nahoru a dolů ze synchronní rychlosti.
- Malé rozměry a hmotnost.
Frekvenční měniče nevyžadují změny v konstrukci elektromotorů. Lze je použít pro všechny typy střídavých elektrických strojů s vinutými rotory nebo rotory nakrátko.
Existuje několik typů měničů a způsobů řízení frekvence. Podívejme se na nejběžnější typy a metody.

Veda frekvenční měniče – pokročilý produkt, který plně odpovídá požadavkům trhu a poskytuje vysokou spolehlivost, efektivitu a flexibilitu v provozu.
Typy frekvenčních měničů
Jedním z úplně prvních schémat frekvenčních měničů byla zařízení s přímým připojením k síti. Střídače tohoto typu mají galvanické připojení k elektrické síti a bývají postaveny na bázi rychlo spínaných tyristorů. Polovodičové prvky jsou obsaženy v můstkových, křížových, nulových a antiparalelních obvodech.
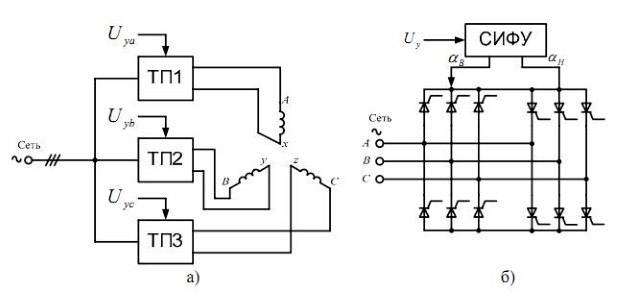
Zařízení s přímou spojkou zajišťují stabilní provoz při nízkých otáčkách motoru a mají vysokou účinnost. Měniče mohou také zajistit návrat elektřiny do sítě v režimu brzdění motorem. V případě potřeby lze výkon zařízení zvýšit připojením dalších jednotek. Mezi nevýhody zařízení patří: nesinusový průběh napětí, možnost regulace rychlosti pouze směrem dolů a relativní složitost řídicího obvodu.
Nejběžnější frekvenční měniče v nízkonapěťových pohonech jsou založeny na obvodu s dvojitou konverzí s jasně definovaným stejnosměrným meziobvodem.
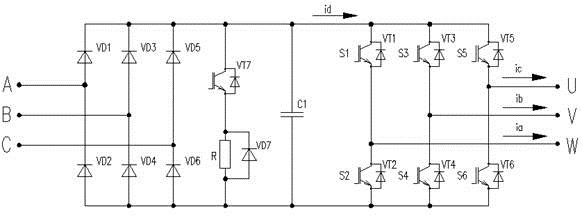
Výkonová část obvodu se skládá z:
- Z diodového třífázového usměrňovače. Jednotka zajišťuje konverzi střídavého proudu na stejnosměrný proud.
- Ze stejnosměrného spoje. Kapacitní prvek filtruje stejnosměrnou složku a vyhlazuje zvlnění, ke kterému dochází během provozu měniče.
- Ze střídače. Funkční blok využívající rychle spínané tranzistory převádí stejnosměrné napětí na střídavé. Frekvence je nastavena algoritmem otevírání/zavírání polovodičových prvků a je určena pulsně šířkovým modulátorem.
Obvody s dvojitou konverzí poskytují čistý sinusový výstup, umožňují řízení rychlosti nad a pod synchronní frekvencí a poskytují tuhost v celém rozsahu. Mezi nevýhody patří určitá ztráta výkonu v důsledku dvojité konverze elektřiny, složitost návrhu a relativně vysoká cena.
Závěr
Nejúčinnějším způsobem je řízení rychlosti otáčení hřídele frekvencí napájecího napětí statoru. Frekvenční měniče:
- Snižte startovací proudy.
- Výrazně snížit spotřebu energie.
- Umožňuje upravit točivý moment při dynamickém zatížení.
- Rychlost otáčení hřídele je plynule řízena v širokém rozsahu.
Zařízení také poskytují ochranu proti fázové nesymetrii, přetížení, zkratu a napěťovým rázům. Moderní invertory také umožňují implementovat jakýkoli zákon o automatickém řízení, provádět dálkové ovládání, vést protokol událostí a mnoho dalšího.